Der Traum vom kabellosen Mähroboter wird langsam Realität. Laut vielen Herstellern mäht man in Zukunft kabellos.
Wir führen die derzeit wichtigsten kabellosen GPS RTK Rasenrobotermarken:




Die Technik der GPS, GNSS und RTK Systemen ist im Bereich der Mähroboter völlig neu. Was mit RTK Systemen in der Landwirtschaft schon lange möglich ist, soll nun in komplexen Mähflächen zum Einsatz kommen. Hersteller werben selbstverständlich gerne mit kabellosen Mährobotern, dabei benötigt es in dieser Thematik allerdings noch viel an Entwicklung. Durch GPS alleine, sind physikalische Grenzen gesetzt.


Im Bild ist die Fläche mittels AIM - Automower Intelligent Mapping dargestellt. Eine Technik mit welcher der Husqvarna Automower Mähroboter anhand eines Rasters die Mähfläche automatisch einteilt und diese abarbeitet. Mit dieser Technik ist es möglich, Bereiche zeitgesteuert zu bearbeiten, inklusive der Möglichkeit an verschiedenen Mähbereichen unterschiedliche Schnitthöhen einzustellen.
Kabellose Mähroboter:
Bei den derzeit erhältlichen kabellosen Rasenrobotern ist am Mähroboter selbst eine GPS Empfänger verbaut. GPS bietet allerdings nur eine Genauigkeit von circa 5-8 Metern. GPS alleine bietet aufgrund der vorherrschenden Wetterlage ( Regen, Wolken, Luftfeuchtigkeit...) eine Ungenauigkeit. Um diese zu umgehen, setzt man auf RTK Stationen ( Real Time Kinematik ), diese Stationen ermöglichen sogenannte Laufzeitkorrekturen welche das GPS Differenz Signal ausgleichen um auf eine Genauigkeit von ungefähr 2-3cm zu kommen. Diese Station ist ein Fixpunkt und bewegt sich nicht. Bei GPS alleine am Mäher, welcher sich permanent bewegt, kommen weitere Ungenauigkeiten hinzu. Durch die "Dreiecksbeziehung" zwischen Satelliten, GPS Empfänger und RTK bekommt der kabellose Rasenroboter auf freier Fläche die gewünschte und benötigte Genauigkeit.

GPS, OpenSky:
GPS (Global Positioning System) ist ein globales Navigationssatellitensystem, das von Satelliten bereitgestellt wird. GPS-Empfänger können Signale von mehreren Satelliten empfangen und ihre genaue Position berechnen, indem sie die Zeitunterschiede zwischen den empfangenen Signalen berechnen. Der Mähroboter kann seine Position genau bestimmen, wenn er eine direkte Sichtverbindung zum Himmel hat, was auch als "Open Sky" bezeichnet wird. Je nach verwendetem GPS-Empfänger benötigt er jedoch mehrere (4-6) Satelliten. Wenn er keine oder zuwenige Satelliten empfängt, hilft auch das RTK-Signal, das mittels Funkstrecke an den Mäher gesendet wird, nicht. Ohne die oben beschriebene "Dreiecksbeziehung" kann das System nicht funktionieren. Diese Situationen treten jedoch relativ häufig auf, z.B. in Mähbereichen mit hohen Mauern, Häusern, Bäumen, Sträuchern und engen Passagen. Der Mäher benötigt eine Sicht zum Himmel (je nach Hersteller, Empfänger und Softwareversion) von etwa 120 Grad.
RTK (Real Time Kinematics):
RTK ist eine Technik, bei der ein RTK-Station, die sich an einem bekannten und festen Ort befindet, hochgenaue GPS-Signale bereitstellt. Diese Signale werden dann an einen GPS-Empfänger gesendet, welcher- wie in unserem Fall, in einem Rasenroboter installiert ist. Die RTK-Signale korrigieren die GPS-Signale und stellen eine hochgenaue Positionsbestimmung bereit.
Odometrie:
Odometrie ist eine Technik zur Bestimmung der Bewegungen eines Systems, indem die Bewegungen und die Änderungen der Radumdrehungen gemessen werden. Diese Informationen werden verwendet, um die Bewegungen des Systems zu verfolgen und seine Position zu berechnen. Die Odometrie ist eine einfache und kostengünstige Möglichkeit, die Bewegung eines Objekts zu verfolgen.
Trägheitsnavigation:
Trägheitsnavigation ist eine Technik zur Bestimmung der Position und Bewegung von beweglichen Objekten. Es misst die Änderung der Geschwindigkeit des Objekts durch den Einsatz mehrerer Beschleunigungsmesser und berechnet auf dieser Basis die Schätzung der Position und Geschwindigkeit. Ideal für Umgebungen ohne externe Referenzen, kann es als Basis für noch präzisere Navigationssysteme verwendet werden.
Visuelle Navigation/ Odometrie:
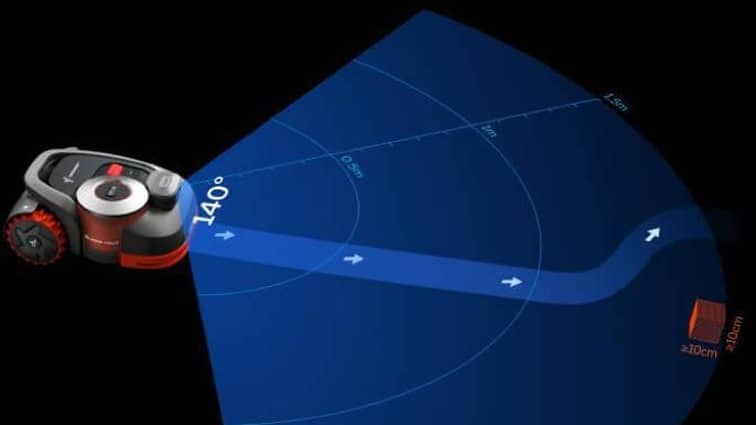
Segway macht es mit seinem VisionFence vor. Ein optionales Modul, welches dem Mäher in Bereichen bei denen es schlechte GPS Signale gibt, mittels Kamera KI die Navigation ermöglicht. Hier fusionieren die Daten aus GPS, RTK, Odometrie und dem Kamerasystem.

Zusammen bieten GPS, Odometrie und RTK eine präzise und robuste Navigationslösung, die für kabellose Rasenroboter - allerdings nicht für jede Situation, geeignet ist.
Rasenroboter und KI:
"Künstliche Intelligenz ist erst dann erreicht, wenn der Rasenroboter genauso wenig Lust hat den Rasen zu mähen, wie man selbst"
Autor: Unbekannt, Quelle: Internet
Als SEGWAY® Navimow, Husqvarna Automower®
und STIGA Stig-A Partner aus Graz Fernitz und Leibnitz, sind wir Ihr Spezialist bei dem Thema kabellose Mähroboter - selbstverständlich auch am Sportplatz oder öffentlichen Flächen mit den Mährobotern Husqvarna CEORA® oder Belrobotics RTK.
Kontaktieren Sie uns
Tel.: +43 (0) 3134 52402
Murbergstrasse 22
AT - 8072 Fernitz bei Graz
office@rasenroboter.guru